
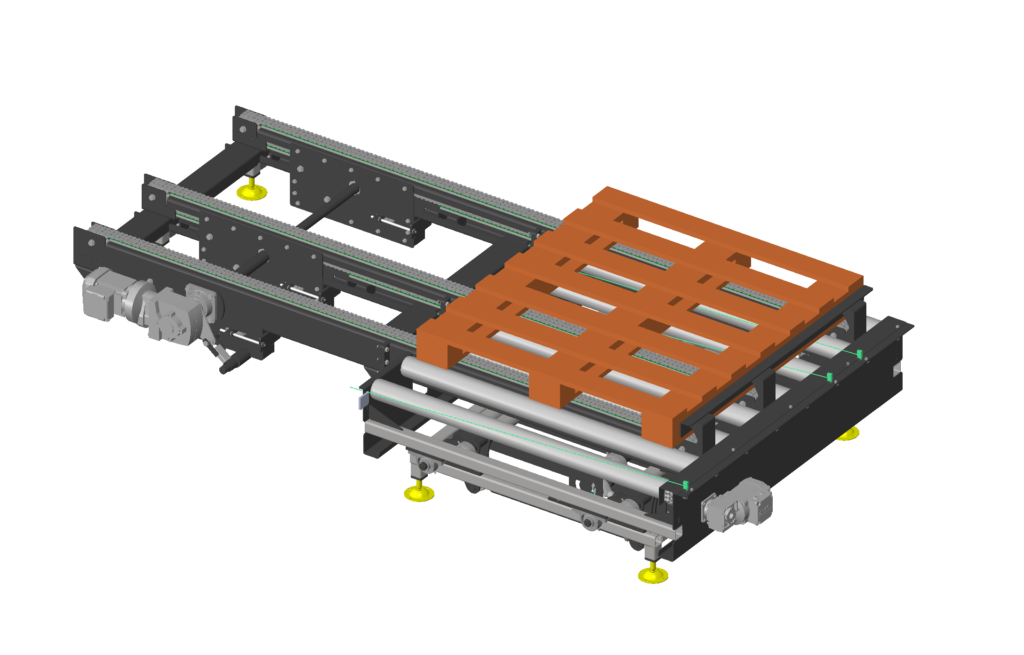
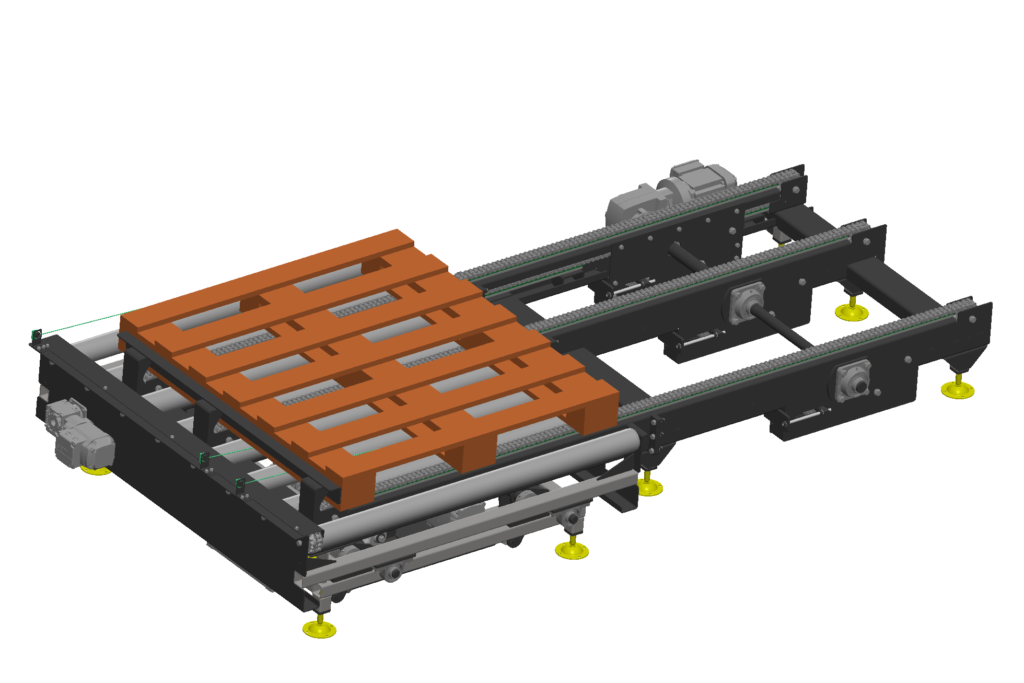
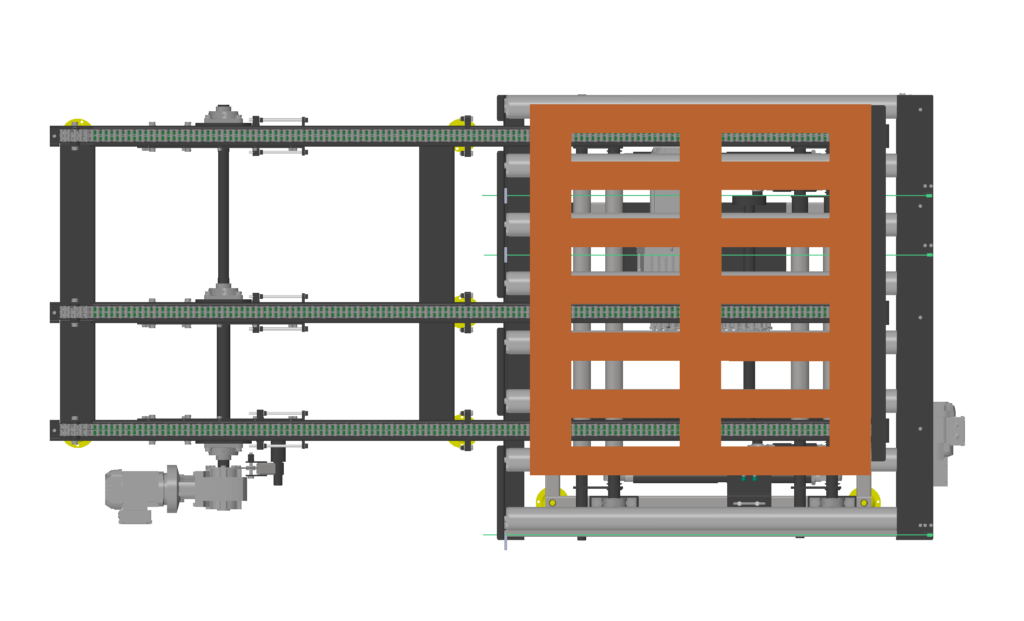
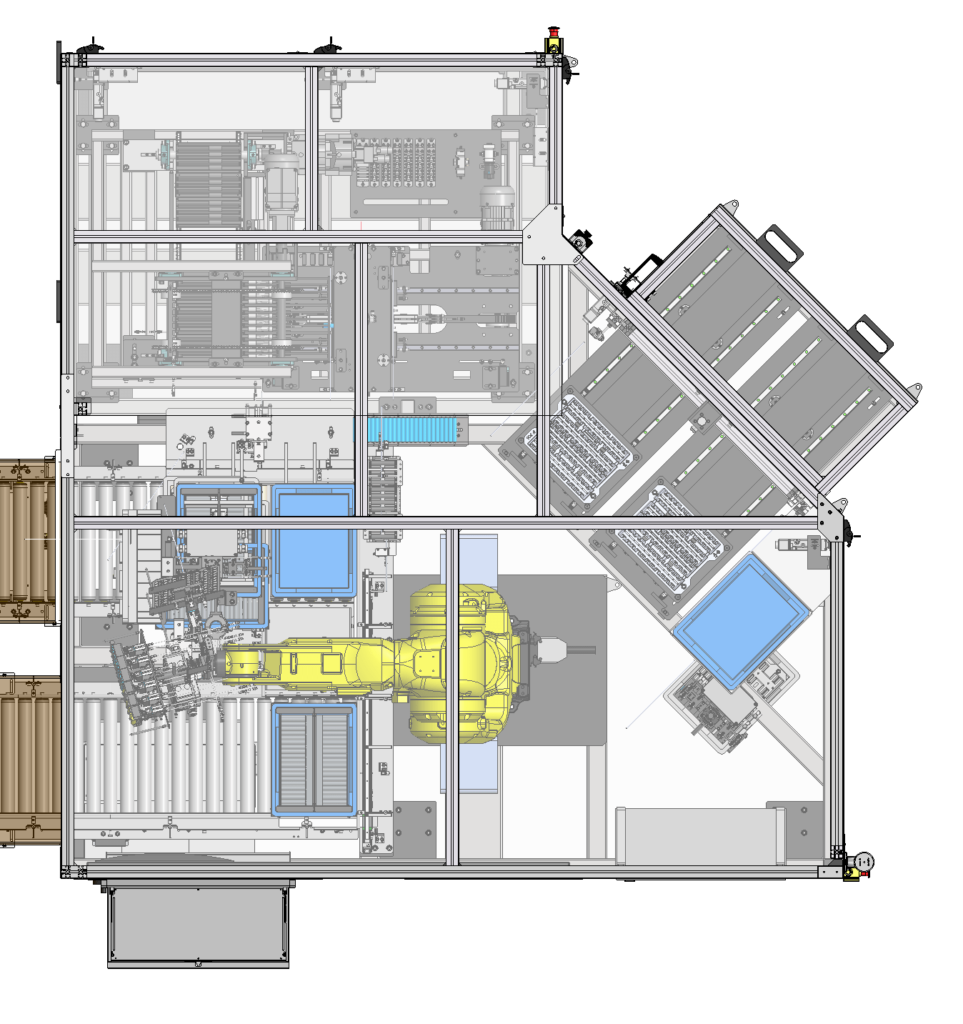
Lifting table
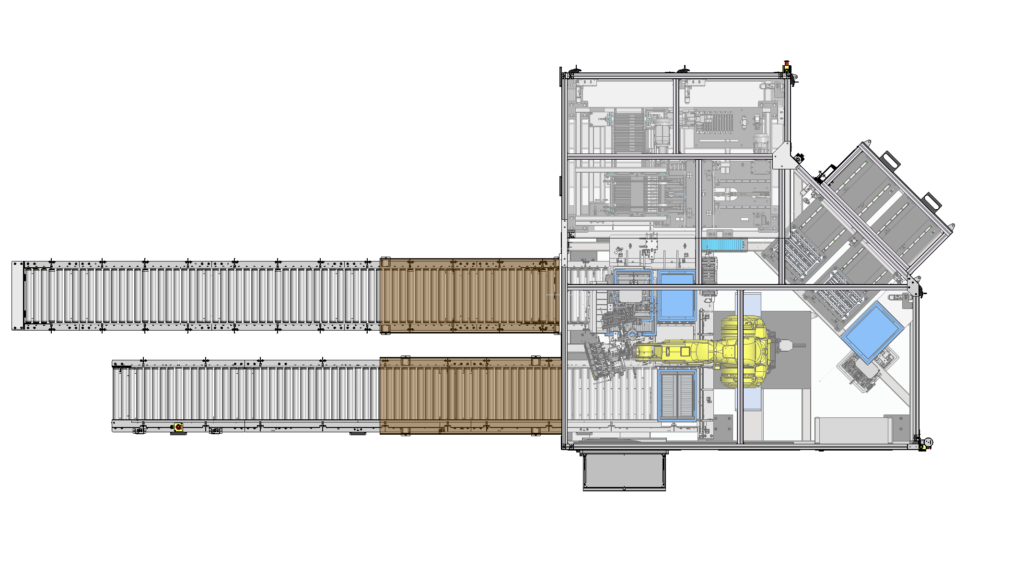
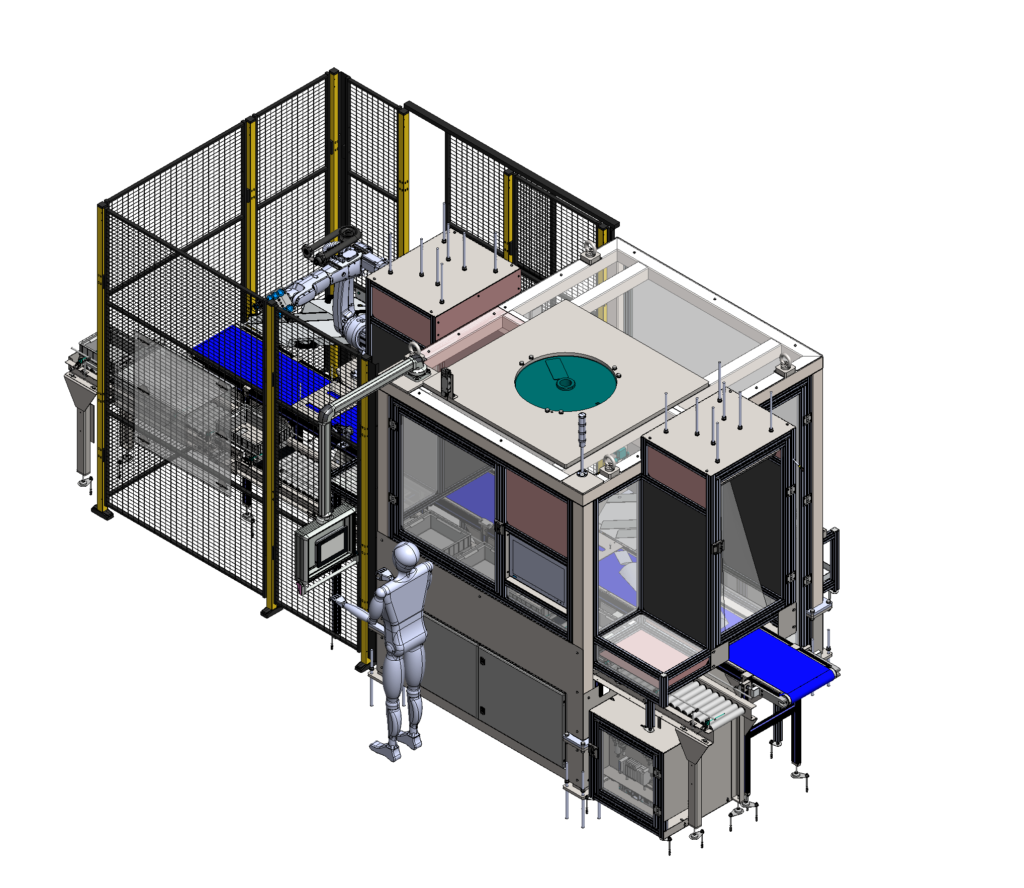
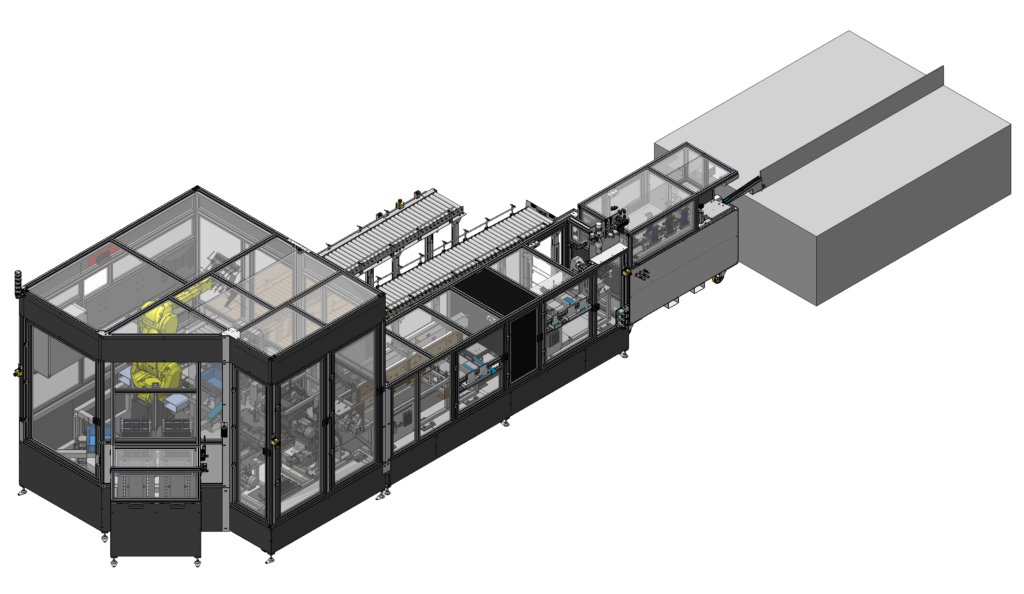
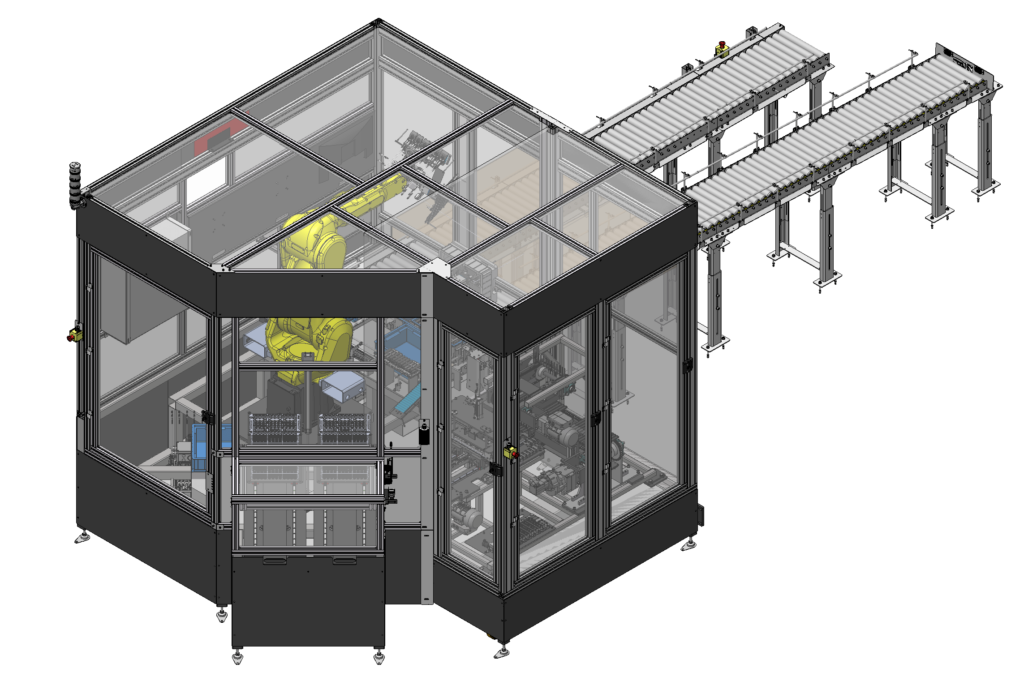
The goal was to design an equipment that could be integrated into my client’s complete system. The goal was to move the pallet back/forward and transfer it to another conveyor without changing the orientation.
Requirements:
- Transferring an EUR pallet, maximum mass is 1 ton
- Transferring with the same orientation
- Compact design which help us to implement in other projects
- Build up the logic and sensors



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}